Der hydraulische Systemdruck, welcher proportional zum Schnecken-Drehmoment ist, kann direkt als Steuergrösse verwendet werden. Aufgrund dessen ist es möglich, mittels geeigneten regelungstechnischen Massnahmen eine sehr hohe Betriebsbereitschaft sowie Betriebssicherheit des Antriebs zu erreichen.
Es gibt zwei Regelmodelle:
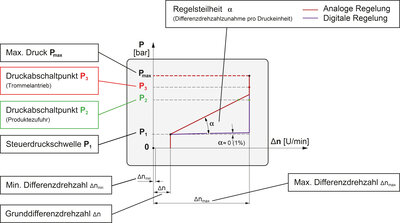
Die digitale Regelung erlaubt eine manuell einstellbare, feste Differenzdrehzahl, die beim Überschreiten des vorher gesetzten Druckes (Schnecken-Drehmoment) die Differenzdrehzahl auf das Maximum „hochtreibt”. Der Punkt, an dem die Differenzdrehzahl steigt, Steuerdruckschwelle P1 genannt, ist variabel einstellbar.
Die analoge Regelung erlaubt eine manuell einstellbare, feste Differenzdrehzahl (Grunddifferenzdrehzahl ∆n) und mit steigendem Druck (Schnecken-Drehmoment) eine graduelle Erhöhung der Differenzdrehzahl. Der Punkt, an dem die Differenzdrehzahl steigt, Steuerdruckschwelle P1 genannt, ist variabel und die Regelsteilheit α ist ebenfalls einstellbar.
Der hydraulische Systemdruck dient als direkte und genaue Regelgrösse.
Sowohl analoge als auch digitale Regelungen sind mit Sicherheitsabschaltungen im Fall von hohem Drehmoment P2 und sehr hohem Drehmoment P3 ausgestattet. Diese werden von Druckschaltern (einstellbar) gemeldet und sind auf Abschaltung der Speisepumpe bei P2 und auf Abschaltung des Trommelantriebs bei P3 gesetzt.
Ein Druckbegrenzungsventil schützt das System vor Überlastung, um Schaden am Schneckenantrieb auf Grund von Überdrehmoment zu verhindern. Dies geschieht bei einem höheren Wert als P3, wobei das maximale Drehmoment an der Schnecke beibehalten wird. In dieser Situation wird der Trommelantrieb ausgeschaltet, die Drehzahl des Trommelantriebs sinkt, die abnehmenden „G”-Kräfte erlauben der Schnecke die Drehung wieder aufzunehmen. Dadurch kann eine Blockierung der Maschine verhindert werden oder diese „entblockiert” werden.
Je nach Art des verwendeten elektronischen Geräts werden die folgenden Betriebsparameter nur angezeigt oder angezeigt und gesteuert. Es ist auch möglich, die gemessenen Betriebsparameter mit einem Interface Gerät zu verarbeiten und die übertragenen Daten mit einer SPS-Steuerung zu steuern. Somit ist eine einfache Integration über normierte Feldbus-Schnittstellen in ein grösseres Leitsystem möglich.
Betriebsparameter wie folgt:
Die Vorteile eines elektronischen Kontrollsystems sind vielfältig:
Es stehen zwei verschiedene elektronisch geregelte Systeme zur Verfügung
Pumpenaggregat VFD
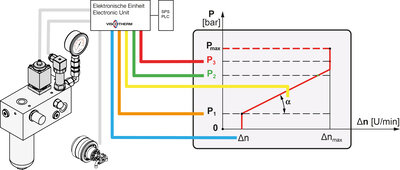
VFD-Regelung => automatische, analoge Regelung, elektronisch mit Frequenzumrichter
Auf dem Steuerblock des Pumpenaggregats mit Frequenzumrichter (VFD) ist ein elektronischer Drucksensor montiert, welcher den gemessenen Systemdruck (Drehmoment) auf die elektronische Anzeige-, Kontroll- oder Interface-Einheit überträgt.
Das System umfasst unter anderem eine Pumpe mit konstantem Fördervolumen. Die nötige Variation des Fördervolumens (und damit der Drehzahl) zum Schneckenantrieb ROTODIFF, wird durch die Verstellung der Pumpendrehzahl erreicht. Die Pumpendrehzahl wird mit einem geeigneten Frequenzumrichter gesteuert. Da die Differenzdrehzahl proportional zur geförderten Ölmenge liegt, ist eine automatische Regelung problemlos möglich. Der gemessene Systemdruck ist proportional zum Drehmoment und kann direkt als Steuergrösse verwendet werden. Analog zum Fördermoment der Schnecke, und damit zur Feststofffüllung der Trommel, kann die Differenzdrehzahl mit hoher Genauigkeit automatisch angepasst werden.
| Pmax | Druckabschaltpunkt (ÜV) |
|---|---|
| P3 | Druckabschaltpunkt Trommelantrieb |
| P2 | Druckabschaltpunkt Produktezufuhr |
| P1 | Steuerdruck |
| α | Drucksteilheit |
| Δn | Differenzdrehzahl |
| Imax | max. Strom |
| I3 | Stromabschaltpunkt Trommelantrieb |
| I2 | Stromabschaltpunkt Produktezufuhr |
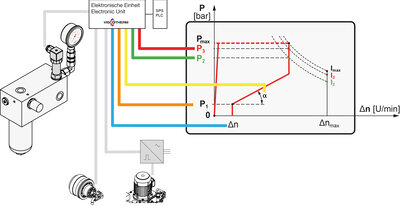
B/C-Regelung => automatische, analoge Regelung, elektronisch mit Proportionaldrosselventil
Auf dem Steuerblock des Pumpenaggregat B/C ist ein elektronischer Drucksensor montiert, welcher den gemessenen Systemdruck (Drehmoment) auf die elektronische Anzeige-, Kontroll- oder Interface-Einheit überträgt.
Ein Proportionaldrosselventil, auch am Steuerblock des Pumpenaggregates B/C montiert, regelt den Ölfluss zum Schneckenantrieb ROTODIFF. Die Ansteuerung an das Proportionaldrosselventil entspricht direkt dem Ölfluss, der dem Antriebsmotor ROTODIFF zugeführt wird.
| Pmax | Druckabschaltpunkt (ÜV) | Δn | Regelsteilheit |
| P3 | Druckabschaltpunkt Trommelantrieb | α | Differenzdrehzahl |
| P2 | Druckabschaltpunkt Produktezufuhr | ||
| P1 | Steuerdruckwelle | ||
| Drucksteilheit |
Der hydrostatisch geregelte Steuerblock nützt die direkte Rückführung des Druckes bzw. Drehmomentes in das System als Regel- bzw. Steuergrösse. Mittels 3 hydrostatischer Einstellorgane werden die Regelungsvorgabewerte eingestellt. Am Manometerdruckschalter werden die beiden Notfunktionen P2 und P3 eingestellt. Hydrostatisch geregelte Systeme zeichnen sich durch einfache Bedienung und äusserste Robustheit aus.
C-Regelung => automatische, analoge Regelung, hydraulisch
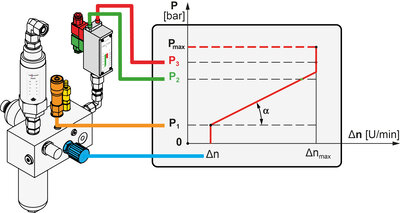
| Pmax | Druckabschaltpunkt (ÜV) |
|---|---|
| P3 | Druckabschaltpunkt Trommelantrieb (rote Fahne) |
| P2 | Druckabschaltpunkt Produktezufuhr (grüne Fahne) |
| P1 | Steuerdruckwelle (Zuschaltdrosselventil) |
| α | Regelsteilheit, Differenzdrehzahlzunahme pro Druckeinheit (Regelsteilheitsdrossel) |
| Δn | Grunddifferenzdrehzahl (Drosselventil) |
Bei den Vollhydraulik Pumpenaggregaten arbeiten wir mit zwei voneinander unabhängigen Arbeitskreisen.
Beim Schneckenantriebskreis entspricht der Steuer- und Regelteil dem des Standard Schneckenantriebs. Es gibt auch zwei Regelmodelle digital oder analog. Die Steuerung ist je nach Anwendung auch in elektronischer oder hydraulischer Ausführung erhältlich.
Der Arbeitskreis des Trommelantriebs ist mit einer stufenlosen Drehzahlregelung, welche elektronisch oder hydraulisch ausgeführt werden kann, ausgestattet.
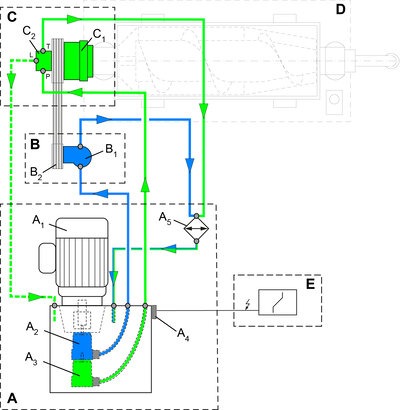
A Hydraulikaggregat
A1 Elektromotor
A2 Hydraulikpumpe (Trommelantrieb)
A3 Hydraulikpumpe (Schneckenantrieb)
A4 Steuerblock (Trommelantrieb)
A5 Steuerblock (Schneckenantrieb)
A6 Klemmenkasten
A7 Kühler
B Trommelantrieb
B1 Hydraulikmotor
B2 Nachsaugventilblock
C ROTODIFF
C1 Schneckenantrieb
C2 Anschlussblock
D Zentrifuge
E Elektronik
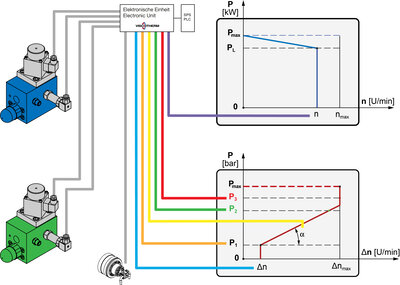
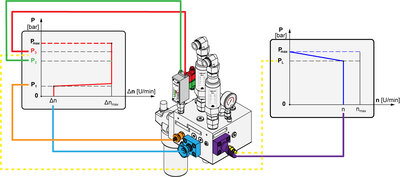
| ROTODIFF | Trommel-Antrieb | ||
| Pmax | Druckabschaltpunkt (ÜV) | Pmax | Druckabschaltpunkt (ÜV) |
| P3 | Druckabschaltpunkt Trommelantrieb | PL | Grenzregeldruck |
| P2 | Druckabschaltpunkt Produktezufuhr | I2 | Stromabschaltpunkt Produktezufuhr |
| P1 | Steuerdruck | n | Trommeldrehzahl |
| α | Regelsteilheit | n max | max. Differenzdrehzahl |
| Δn | Grunddifferenzdrehzahl | ||
| Δn max | max. Differenzdrehzahl | ||
E-B, E-C –Steuerung => automatische digitale Regelung, hydrostatisch
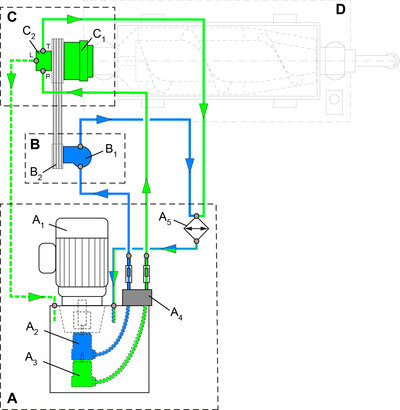
A Hydraulikaggregat
A1 Elektromotor
A2 Hydraulikpumpe (Trommelantrieb)
A3 Hydraulikpumpe (Schneckenantrieb)
A4 Steuerblock
A5 Kühler
B Trommelantrieb
B1 Hydraulikmotor
B2 Nachsaugventilblock
C ROTODIFF
C1 Schneckenantrieb
C2 Anschlussblock
D Zentrifuge
| ROTODIFF | Trommel-Antrieb | ||
| Pmax | Druckabschaltpunkt (ÜV) | Pmax | Druckabschaltpunkt (ÜV) |
| P3 | Druckabschaltpunkt Trommelantrieb | PL | Grenzregeldruck |
| P2 | Druckabschaltpunkt Produktezufuhr | I2 | Stromabschaltpunkt Produktezufuhr |
| P1 | Steuerdruck | n | Trommeldrehzahl |
| Δn | Grunddifferenzdrehzahl | n max | max. Differenzdrehzahl |
| Δn max | max. Differenzdrehzahl | ||
+41 44 986 28 00
+41 44 986 28 28
info(at)viscotherm.ch
© 2020 by Viscotherm AG, Switzerland. Alle Rechte vorbehalten.
Design by easy graphics ag